エンコーダの原理
当社のエンコーダは「対象物がどれくらい移動したか」、「位置」や「変位(移動距離/角度)」を検出するセンサ製品です。
リニア方式(直線)
ロータリー方式(回転)
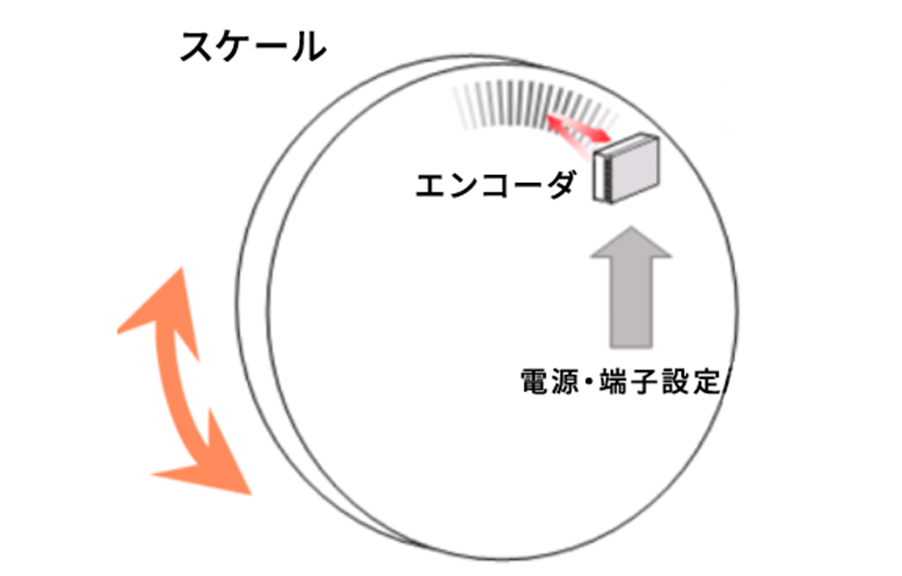
エンコーダの構成
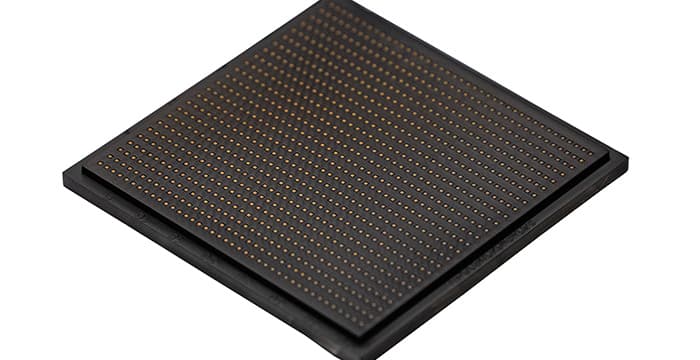
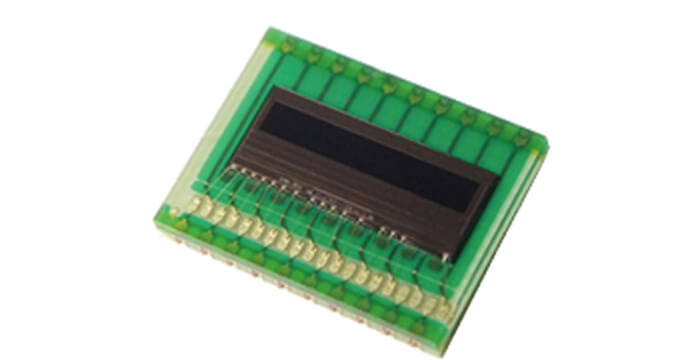
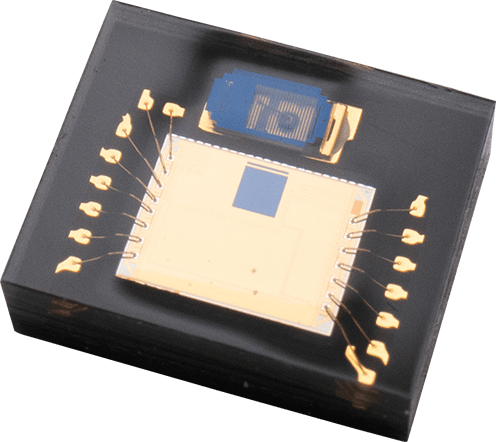
【SMD-01B】
エンコーダ構成例

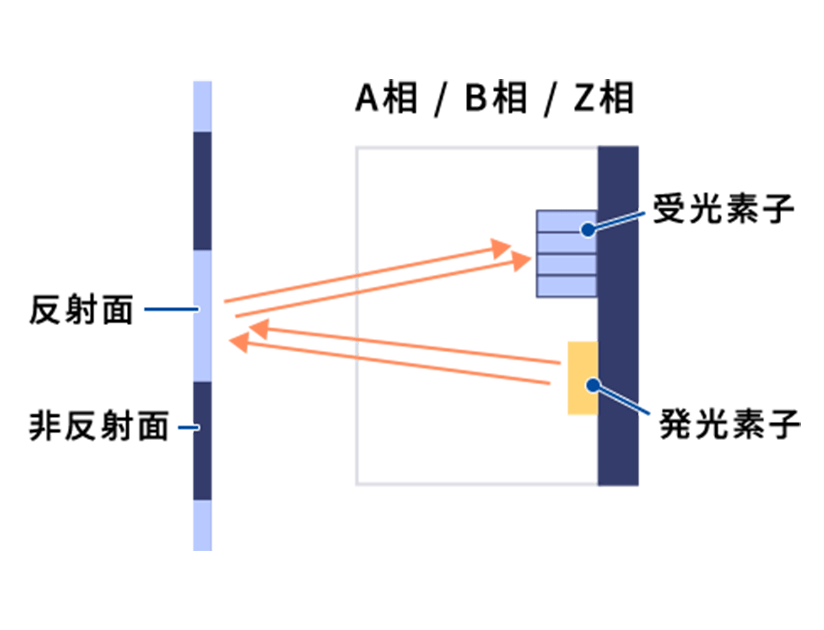
LEDが発光する光をスケールに反射させ、その反射光を*受光素子(Photo diode array)が受光します。
スケールは反射/非反射のパターンが交互に連続しており、スケールが動くことによってOEICが受光する光量が変化し、それによって移動量を検知しています。
受光素子は、OEICに集積されています。
反射型と透過型の違い
-
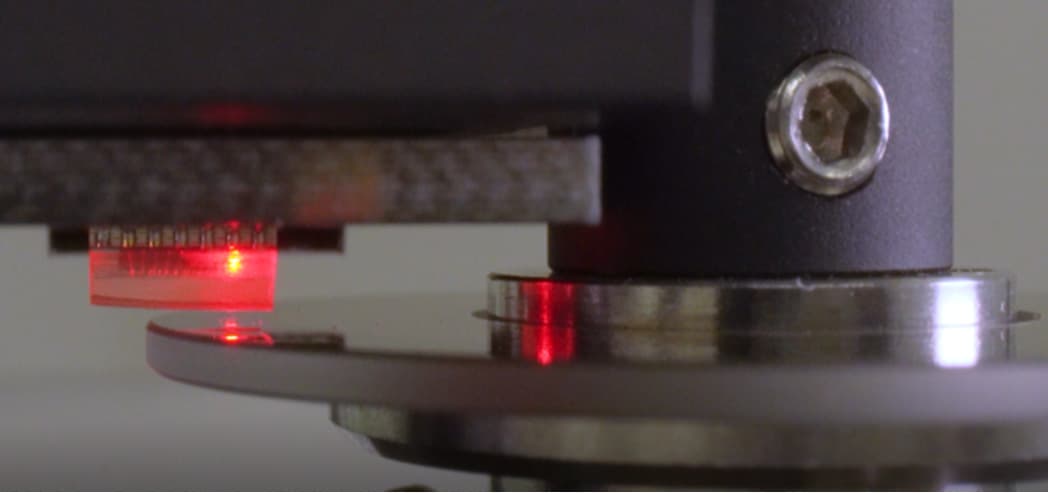
反射型
-
発光素子と受光素子を同一の平面上に配置し、スケールで反射した光を受光。当社の光エンコーダは、反射型のエンコーダです。
メリット小形(部品点数小)、薄型化の構成が可能
組み立て容易デメリット-
-
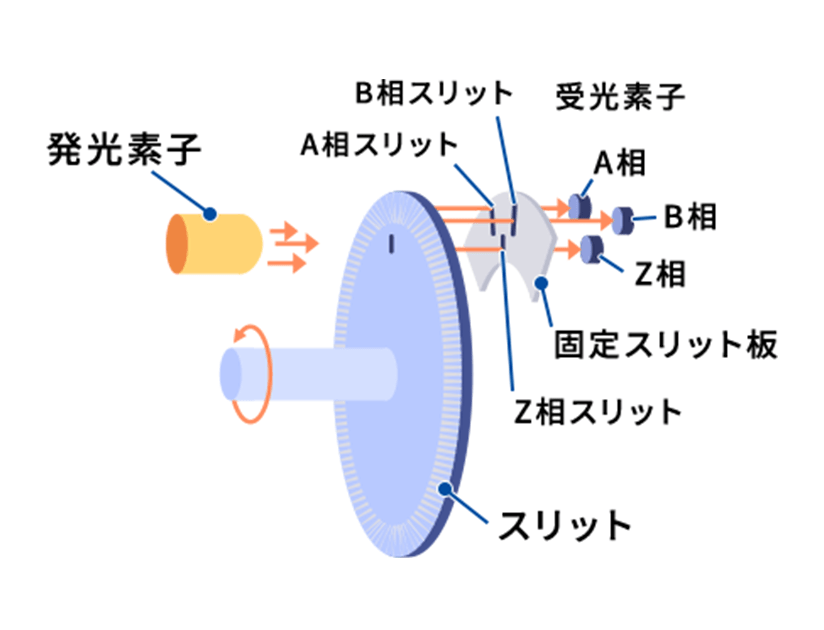
透過型
-
発光素子と受光素子でスケールを挟み込みスリットをすり抜けた光を受光。
メリット成熟技術の組み合わせで構成が可能デメリット部品点数が多くなる
組み立て難:取り付け精度要
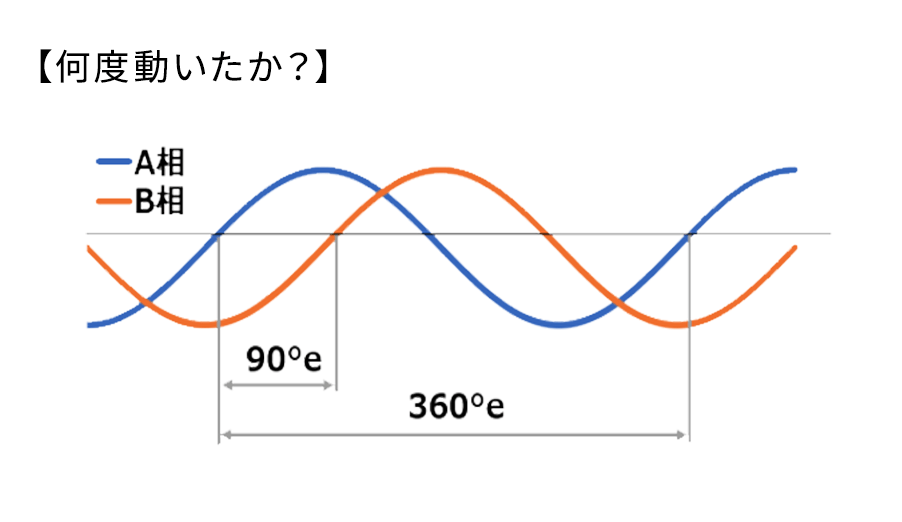
インクリメンタルとアブソリュートの違い
-
インクリメンタル:相対位置検出
-
「どれだけ動いたか」、相対的な移動距離(または角度)をカウント
電源を落とすと自己位置を認識できない為、復電後は原点に戻す必要がある (Z相を使用)。
-
アブソリュート:絶対位置検出
-
基準となる位置(原点)からの距離情報を取得可能。移動距離だけでなく、「位置」も検出。

リニアとロータリーの違い
-
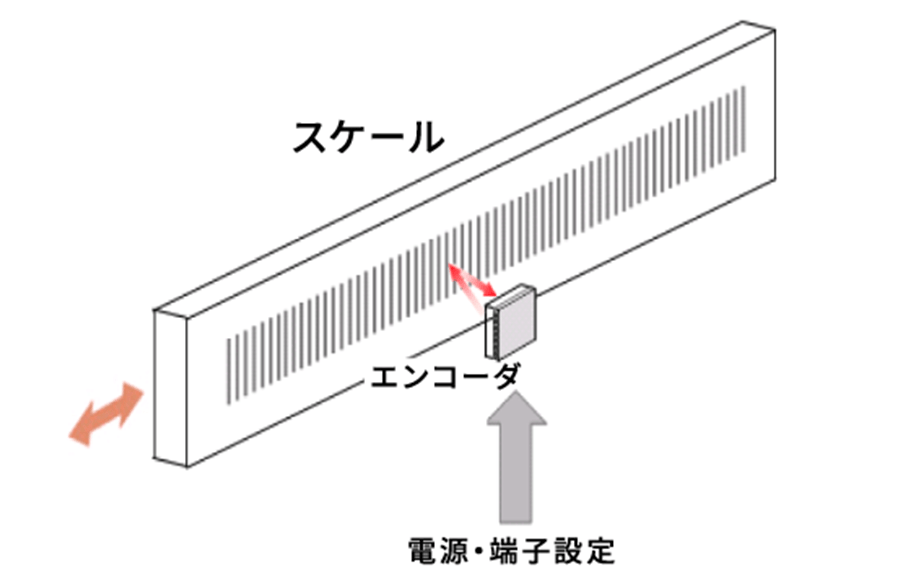
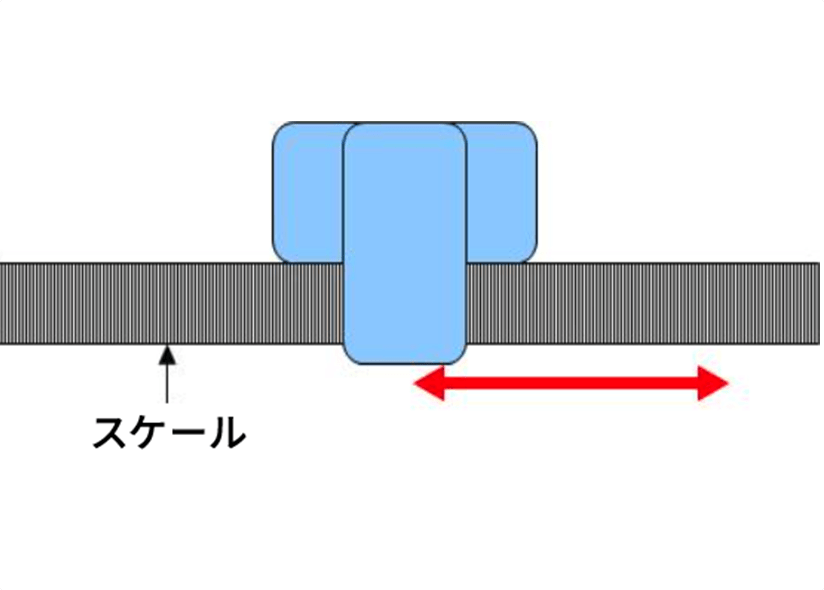
リニアエンコーダ
-
直線的な動作を検知
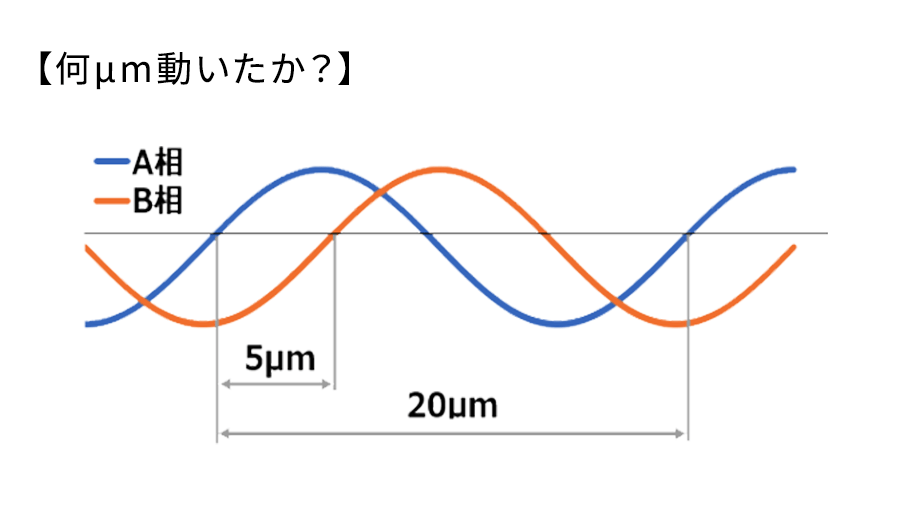
SMD-01Bの場合、1周期=20μm
信号(周期)をカウントすることで移動量の検知が可能。例えば30周期動作したとすると20umX30周期=0.6㎜となります。【アプリケーション例】
XYステージ、測長ゲージなど
-
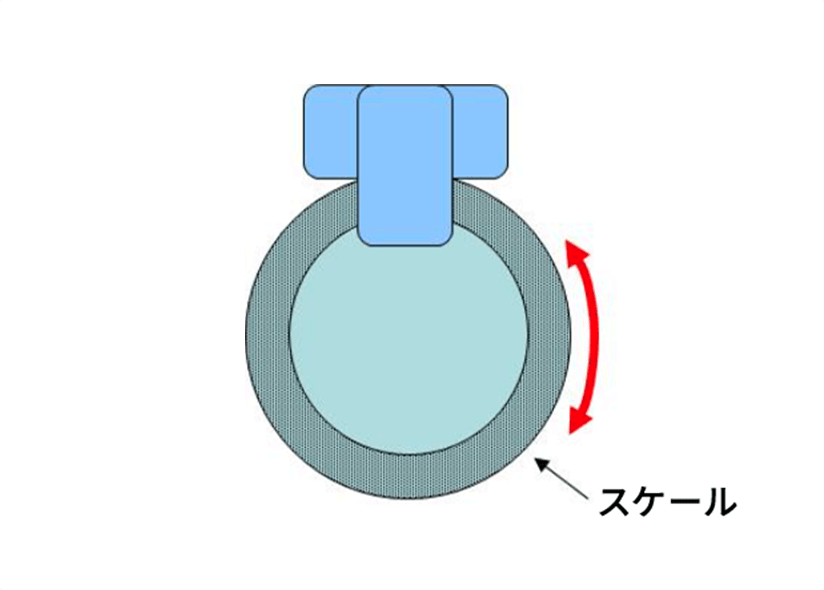
ロータリーエンコーダ
-
回転の動作を検知
信号(周期)をカウントすることで角度の検知が可能。例えば500周期動作したとすると360°÷500周期=0.72°となります。【アプリケーション例】
各種モーター、ロボットアームなど
評価用スケール一覧
| 製品名 | 方式 | 材質 | サイズ |
|---|---|---|---|
|
SMD-01B
|
ロータリー
|
ガラス
|
AB(Z) 4000PPR
φ30/13.4mm |
|
リニア
|
ガラス
|
AB L=30mm
ABZ L=30mm
|
|
|
SMD-04B
|
ロータリー
|
ガラス
|
ABZ 4000PPR
φ30/13.4mm |
|
リニア
|
ガラス
|
AB L=30mm
ABZ L=30mm
|
|
|
SME-08A/B
|
ロータリー
|
金属
|
865/500PPR
φ26/4mm |
|
リニア
|
PET
|
L=100mm
|
|
|
SM3414B
|
リニア
|
PET
|
L=52.5mm
|
評価用スケールについての詳細はお問い合わせください
スケールメーカー
セイコーNPC向けのスケールの開発を進めているスケールメーカは以下の通りです
| メーカ名/ お問い合わせ先 |
住所 | 電話 | URL | |
|---|---|---|---|---|
|
(株)コシブ精密
本社営業 |
〒179-0085
東京都練馬区早宮2-20-11 |
kakizawa@koshibu.co.jp
(Attn: YUTAKA KAKIZAWA) |
||
|
(株)メルテック
営業部 |
〒270-0164
千葉県流山市流山1038 |
|||
|
(株)アルファー精工
営業部 エンコーダ担当 |
〒192-0154
東京都八王子市下恩方315-1 |
評価ツール情報のダウンロード
お問い合わせ
お問い合わせフォームはこちら